3D kameror
Begreppet 3D-kamera kan användas för att beskriva flera typer av kameror baserade på olika tekniker.
Det vi avser här med begreppet 3D-kamera är enkelt uttryckt en kamera som i stället för färginformation i varje pixel inhämtar avståndsinformation.
Detta är inte en helt ny teknik, men sitt stora kommersiella genombrott fick tekniken när Microsoft lanserade Kinect till sin spelkonsol X-box.
Strukturerat ljus
En sensor som arbetar med strukturerat ljus projicerar ett mönster av infraröda punkter med vars hjälp man beräknar en 3D bild. Man nyttjar två kompletterande tekniker för att generera denna 3D-information; dels en teknik som ofta kallas strukturerat ljus (eng Structured Light) och djup från fokus (eng Depth from Focus) där man använder en astigmatisk lins, dvs en lins med olika fokallängd på X- och Y-axeln, för att differentiera mellan objekt i rymden framför kameran baserat på utsträckningen och riktningen på de infraröda punkterna.
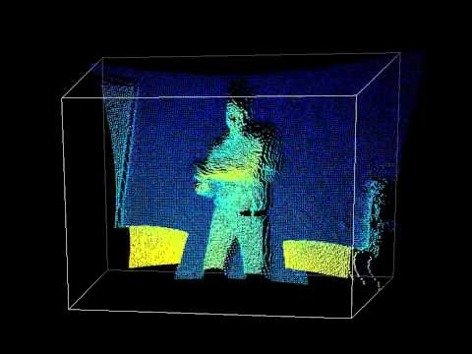
Till vänster nedan syns punktmönstret genom ett filter som tillåter oss att se den infraröda belysningen. Till höger syns en bild där varje färgnyans motsvarar ett avstånd.

Time-of-Flight
Denna teknik, ofta kallad ToF, kan kortfattat sägas skicka ut en ljuspuls och sedan mäta hur lång tid det tar för den att återvända till sensorn. I och med att ljusets hastighet är känd görs en beräkning på hur lång tid som gick från det att ljuset sändes ut till att det fångas upp av sensorn igen och denna tid översätts till ett avstånd. De vanligaste teknikerna för denna typ av sensorer är baserade på pulsad respektive kontinuerligt modulerad belysning. Också detta ljus är infrarött, vanligtvis i våglängsområdet 780-900 nm.